Publications
For a complete list of publications please visit Google Scholar
Highlights

Robotic exoskeletons can enhance human locomotion by reducing its metabolic cost. Designing effective wearable assistive devices requires a systematic approach that accounts for the influence of device kinematics/dynamics and effects of assistance torques on human performance. While comprehensive human-subject experiments to evaluate multiple designs are often impractical, musculoskeletal simulations can serve as a powerful tool for optimizing exoskeleton designs and their corresponding assistance strategies. This paper presents a musculoskeletal simulation-based multi-criteria design optimization framework to systematically evaluate and compare various exoskeleton configurations under realistic physical constraints. In this study, the multi-criteria optimization framework is used to characterize the trade-off between metabolic efficiency and power use of mono- and bi-articular lower-limb exoskeleton configurations under optimal assistance torques. The multi-criteria optimization results provide a fair basis for rigorous comparison among various exoskeleton configurations and their corresponding optimal assistance torque profiles, considering realistic actuator saturation limits and the detrimental effects of exoskeleton reflected inertia on metabolic consumption. The results offer valuable insights to guide assistive exoskeleton designs under real-world constraints.
A.K. Bonab and V. Patoglu
IEEE Transactions on Neural Systems and Rehabilitation Engineering (2026)

During human motor skill training and physical rehabilitation, there is an inherent trade-off between task difficulty and user performance. Characterizing this trade-off is crucial for evaluating user performance, designing assist-as-needed (AAN) protocols, and assessing the efficacy of training protocols. In this study, we propose a novel human-in-the-loop (HiL) Pareto optimization approach to characterize the trade-off between task performance and the perceived challenge level of motor learning or rehabilitation tasks. We adapt Bayesian multi-criteria optimization to systematically and efficiently perform HiL Pareto characterizations. Our HiL optimization employs a hybrid model that measures performance with a quantitative metric, while the perceived challenge level is captured with a qualitative metric derived from preference-based user feedback. We demonstrate the feasibility of the proposed HiL Pareto characterization through a user study. Furthermore, we present the utility of the framework through three use cases in the context of a manual skill training task administered to healthy individuals with haptic feedback. First, we demonstrate how the characterized trade-off can be used to design a sample AAN training protocol for a motor learning task and to evaluate the group-level efficacy of the proposed AAN protocol relative to a baseline adaptive assistance protocol. Second, we demonstrate that individual-level comparisons of the trade-offs characterized before and after the training session enable fair evaluation of training progress under different assistance levels. This evaluation method is more general than standard performance evaluations, as it can provide insights even when users cannot perform the task without assistance. Third, we show that the characterized trade-offs also enable fair performance comparisons among different users, as they capture the best possible performance of each user under all feasible assistance levels.
H. Tolasa and V. Patoglu
IEEE Transactions on Haptics (2026)

Effective upper-extremity rehabilitation requires intensive and precise movement training, yet conventional therapies lack accurate motion tracking. Robotic exoskeletons address this limitation but are often hindered by ergonomic misalignment and limited adaptability. The AssistOn-Arm, a novel self-aligning exoskeleton, integrates ergonomic design and back-drivable actuation to enhance comfort and facilitate natural user interaction. This study aimed to assess the usability and ergonomics of the device in healthy participants and to conduct a pilot clinical evaluation in individuals with upper-extremity impairments. Thirty healthy participants and twelve patients with shoulder impairments performed predefined tasks under participant-active and device-active conditions. Kinematic data captured concurrently with AssistOn-Arm and Xsens MVN demonstrated strong agreement between conditions. Quantitative analysis revealed no significant differences (p > 0.05) in flexion, elevation, abduction–adduction, and external rotation, indicating reliable alignment with natural joint axes. Significant differences (p < 0.05) were observed only in sagittal hyperextension and internal rotation, reflecting device mechanical constraints. The study confirms the clinical feasibility of AssistOn-Arm as a sensor-driven, self-aligning exoskeleton that bridges engineering innovation and precision rehabilitation, paving the way for its integration into clinical practice.
H. Argunsah, B. Yalcin, M. A. Ergin, G. Coruhlu, M. Yalcin, V. Patoglu and Z. Guven

We study a realistic model of series elastic actuation (SEA) under velocity-sourced impedance control (VSIC), where the inherent damping of the series elastic element is considered during the analysis, even when only the elasticity of the series damped elastic element is used to estimate the interaction forces. We establish a fundamental rendering limitation when the viscous damping of the physical filter is considered in the plant model and prove that passive rendering of stiffness levels that are higher than the stiffness of the physical filter, as well as passive rendering of Voigt models whose damping levels exceed the physical damping of the plant, are possible. We introduce passive physical equivalents of the closed-loop SEA systems with inherent series damping while rendering Kevin-Voigt, spring, and null impedance models to provide an intuitive understanding of the passivity bounds and to enable rigorous comparisons of rendering performance among various closed-loop systems with different plant models (including or omitting series damping) and/or controllers (utilizing different interaction force estimates). We present a comprehensive set of experiments to verify our results and demonstrate the effect of including/omitting the damping of the physical filter in the model of SEA.
C. U. Kenanoglu and V. Patoglu
ASME Journal of Dynamic Systems, Measurement, and Control (2025)
We study reduced-order models of series elastic actuation under velocity-sourced impedance control, where the inner motion controller is assumed to render the system into an ideal motion source within a control bandwidth and replaced by a low-pass filter. We present necessary and sufficient conditions for the passivity of this system and prove that the passivity results obtained through the reduced-order model may violate the passivity of the full-order model. To enable safe use of the reduced-order model, we derive conditions under which the passivity bounds of the reduced-order model guarantee the passivity of the full-order system. Moreover, we synthesize passive physical equivalents of closed-loop systems while rendering Kevin-Voigt, linear spring, and null impedance models to provide rigorous comparisons of the passivity bounds and rendering performance among the full- and reduced-order models. We verify our results through a comprehensive set of simulations and experiments.
C. U. Kenanoglu and V. Patoglu
IEEE Robotics and Automation Letters (2025)
During haptic rendering, a visual display and a haptic interface are commonly utilized together to elicit multi-sensory perception of a virtual object, through a combination and integration of force-related and movement-related cues. In this study, we explore visual-haptic cue integration during multi-modal haptic rendering under conflicting cues and propose a systematic means to determine the optimal visual scaling for haptic manipulation that maximizes the perceived realism of spring rendering for a given haptic interface. We show that the parameters affecting visual-haptic congruency can be effectively optimized through a qualitative feedback-based human-in-the-loop (HiL) optimization to ensure a consistently high rating of perceived realism. Accordingly, the multi-modal perception of users can be successfully enhanced by solely modulating the visual feedback without altering the haptic feedback, to make virtual environments feel stiffer or more compliant, significantly extending the range of perceived stiffness levels for a haptic interface. We extend our results to a group of individuals to capture the multi-dimensional psychometric field that characterizes the cumulative effect of feedback modalities utilized during sensory cue integration under conflicts. Our results not only provide reliable estimates of just noticeable difference thresholds for stiffness with and without visual scaling but also capture all the prominent features of sensory cue integration, indicating weights that are proportional to the congruency level of manipulated visual signals. Overall, preference-based HiL optimization excels as a systematic and efficient method of studying multi-modal perception under conflicts.
H. Tolasa, B. Catkin and V. Patoglu
IEEE Transactions on Haptics (2025)
We introduce minimal passive physical realizations of series (damped) elastic actuation (S(D)EA) under closed-loop control to determine the effect of different plant parameters and controller gains on the closed-loop performance of the system and to establish an intuitive understanding of the passivity bounds. Furthermore, we explicitly derive the feasibility conditions for these passive physical equivalents and compare them to the necessary and sufficient conditions for the passivity of S(D)EA under velocity-sourced impedance control (VSIC) to establish their relationship. Through the passive physical equivalents, we rigorously compare the effect of different plant dynamics (e.g., SEA and SDEA) on the system performance. We demonstrate that passive physical equivalents make the effect of controller gains explicit and establish a natural means for effective impedance analysis. We also show that passive physical equivalents promote co-design thinking by enforcing simultaneous and unbiased consideration of (possibly negative) controller gains and plant parameters. We demonstrate the usefulness of negative controller gains when coupled with properly designed plant dynamics. Finally, we provide experimental validations of our theoretical passivity results and comprehensive characterizations of the haptic rendering performance of S(D)EA under VSIC.
C. U. Kenanoglu and V. Patoglu
IEEE Transactions on Haptics (2024)
The fidelity of haptic rendering is characterized by the perceived realism capturing the level of similarity to a corresponding tangible object. Perceived realism depends on the musculoskeletal, mental, and perceptual properties of the individuals that manipulate the system. Human-in-the-loop (HiL) studies provide a feasible means for the concurrent optimization of the performance of the overall haptic rendering process, as the physical limitations of the hardware, the factors affecting the fidelity of the rendering algorithm, and the limitations of human action and perception can all be considered simultaneously. In this study, we propose the use of preference-based HiL optimization techniques based on sample-efficient Bayesian optimization algorithms and qualitative pairwise comparisons to maximize the perceived realism of haptic rendering tasks. We present two HiL optimization studies that maximize the perceived realism of spring and friction rendering and validate our results by comparing the HiL-optimized rendering models with expert-tuned nominal models. We show that the system parameters can effectively be optimized within a reasonable amount of time using a preference-based HiL optimization approach. Furthermore, we demonstrate that the approach provides an efficient means of studying the effect of haptic rendering parameters on perceived realism by capturing the interactions among the parameters, even for relatively high dimensional parameter spaces.
B. Catkin and V. Patoglu
IEEE Transactions on Haptics (2023)
We study the effect of low-pass filtering on the passivity and performance of series elastic actuation (SEA) under velocity-sourced impedance control (VSIC) while rendering virtual linear springs and the null impedance. We analytically derive the necessary and sufficient conditions for the passivity of SEA under VSIC with filters in the loop. We demonstrate that low-pass filtered velocity feedback of the inner motion controller amplifies the noise at the outer force loop, necessitating the force controller also be equipped with low-pass filtering. We derive passive physical equivalents of the closed-loop systems to provide intuitive explanations of the passivity bounds and to rigorously compare the performance of controllers with and without low-pass filtering. We show that, while low-pass filtering improves the rendering performance by decreasing the parasitic damping effects and allowing for higher motion controller gains, it also introduces more strict bounds on the range of passively renderable stiffness. We experimentally verify the passive stiffness rendering bounds and performance improvements for SEA under VSIC with filtered velocity feedback.
T. Kenanoglu, C. U. Kenanoglu and V. Patoglu
IEEE Transactions on Haptics (2023)
We establish a fundamental limitation of stiffness rendering with series elastic actuation by rigorously proving that no causal controller can passively render virtual stiffness levels that are higher than the stiffness of the physical series elastic element. To relax this bound, we propose the addition of a viscous damping term parallel to the elastic element to form series damped elastic actuation (SDEA). We show that there exist LTI controllers for SDEA that can relax the passivity bound on the virtual stiffness, and derive the necessary and sufficient conditions for the passive stiffness rendering with SDEA under such a controller. We experimentally verify the relaxed passive stiffness rendering bounds for SDEA, by studying the coupled stability of interactions with most destabilizing environments.
C. U. Kenanoglu and V. Patoglu
IEEE Transactions on Haptics (2023)
We propose, implement, and evaluate a natural human-machine control interface for a variable stiffness transradial hand prosthesis that achieves tele-impedance control through surface electromyography (sEMG) signals. This interface, together with variable stiffness actuation (VSA), enables an amputee to modulate the impedance of the prosthetic limb to properly match the requirements of a task while performing activities of daily living (ADL). Both the desired position and stiffness references are estimated through sEMG signals and used to control the VSA hand prosthesis. In particular, regulation of hand impedance is managed through the impedance measurements of the intact upper arm; this control takes place naturally and automatically as the amputee interacts with the environment, while the position of the hand prosthesis is regulated intentionally by the amputee through the estimated position of the shoulder. The proposed approach is advantageous since the impedance regulation takes place naturally without requiring amputees’ attention and diminishing their functional capability. Consequently, the proposed interface is easy to use, does not require long training periods or interferes with the control of intact body segments. This control approach is evaluated through human subject experiments conducted over able volunteers where adequate estimation of references and independent control of position and stiffness are demonstrated.
E. Hocaoglu and V. Patoglu
Frontiers in NeuroRobotics(2022)
We present the design, implementation, and experimental evaluation of a low-cost, customizable, easy-to-use transradial hand prosthesis capable of adapting its compliance. Variable stiffness actuation (VSA) of the prosthesis is based on antagonistically arranged tendons coupled to nonlinear springs driven through a Bowden cable based power transmission. Bowden cable based antagonistic VSA can, not only regulate the stiffness and the position of the prosthetic hand but also enables a light-weight and low-cost design, by the opportunistic placement of motors, batteries, and controllers on any convenient location on the human body, while nonlinear springs are conveniently integrated inside the forearm. The transradial hand prosthesis also features tendon driven underactuated compliant fingers that allow natural adaption of the hand shape to wrap around a wide variety of object geometries, while the modulation of the stiffness of their drive tendons enables the prosthesis to perform various tasks with high dexterity. The compliant fingers of the prosthesis add inherent robustness and flexibility, even under impacts. The control of the variable stiffness transradial hand prosthesis is achieved by an sEMG based natural human-machine interface.
E. Hocaoglu and V. Patoglu
Frontiers in NeuroRobotics(2022)
Series elastic actuation (SEA) is an interaction control paradigm that relies on a compliant force sensing element and utilizes the model of this compliant dynamics in closed-loop force control. We present sufficient conditions for passivity of SEA under model reference force control (MRFC) during null impedance rendering. We prove that overestimation of robot inertia and underestimation of the stiffness of the series elastic element can ensure coupled stability of interaction for SEA under MRFC during null impedance rendering, as long as a lower limit on damping compensation is not violated. We experimentally verify the passivity bounds and demonstrate the null impedance rendering performance of MRFC.
C. U. Kenanoglu and V. Patoglu
IEEE Transactions on Haptics (2022)
Motivated by autonomous warehouse applications in the real world, we study a variant of Multi-Agent Path Finding (MAPF) problem where robots also need to pick and deliver some items on their way to their destination. We call this variant the Multi-Agent Pick and Delivery with Capacities (MAPDC) problem. In addition to the challenges of MAPF (i.e., finding collision-free plans for each robot from an initial location to a destination while minimizing the maximum makespan), MAPDC asks also for the allocation of the pick and deliver tasks among robots while taking into account their capacities (i.e., the maximum number of items one robot can carry at a time). We study this problem with two different approaches, action planning vs path finding, using Answer Set Programming with two different computation modes, single-shot vs multi-shot.
N. Tajelipirbazari, C. U. Yildirimoglu, O. Sabuncu, A. C. Arici, I. H. Ozen, V. Patoglu and E. Erdem
International Symposium on Practical Aspects of Declarative Languages (2022)

Series elastic actuation (SEA) is a widely-used interaction control approach that relies on an intentionally introduced compliant element between the actuator and the end-effector and the utilization of the model of this compliant element in closed-loop force control to achieve high interaction performance. Velocity-sourced impedance control (VSIC) is the most commonly employed controller for SEA due to its rendering performance, robustness, and ease of tuning. The necessary and sufficient conditions for the frequency-domain passivity of SEA under VSIC have been extensively studied in the literature, establishing the range of passively renderable impedances. In this study, we advocate the addition of physical damping in parallel to the series elastic element in SEA and provide sufficient conditions for the passivity of series damped elastic actuation (SDEA) under VSIC while rendering null space, linear spring, and Voigt model virtual environments. We rigorously prove that SDEA can extend the range of impedances that can be passively rendered with SEA and improve the control performance of the system thanks to the physical damping in parallel to the compliant element. Furthermore, we show the necessity of a physical dissipative element parallel to the series elastic component to render Voigt models and the necessity of the integral gain of the motion controller to render virtual environments modeled by a linear spring.
U. Mengilli, Z. O. Orhan, U. Caliskan and V. Patoglu

Successful plan generation for autonomous systems is necessary but not sufficient to guarantee reaching a goal state by an execution of a plan. Various discrepancies between an expected state and the observed state may occur during the plan execution (e.g., due to unexpected exogenous events, changes in the goals, or failure of robot parts) and these discrepancies may lead to plan failures. For that reason, autonomous systems should be equipped with execution monitoring algorithms so that they can autonomously recover from such discrepancies. We introduce a plan execution monitoring algorithm that operates under partial observability. This algorithm relies on novel formal methods for hybrid prediction, diagnosis and explanation generation, and planning. The prediction module generates an expected state after the execution of a part of the plan from an incomplete state to check for discrepancies. The diagnostic reasoning module generates meaningful hypotheses to explain failures of robot parts. Unlike the existing diagnosis methods, the previous hypotheses can be revised, based on new partial observations, increasing the accuracy of explanations as further information becomes available. The replanning module considers these explanations while computing a new plan that would avoid such failures. All these reasoning modules are hybrid in that they combine high-level logical reasoning with low-level feasibility checks based on probabilistic methods. We experimentally show that these hybrid formal reasoning modules improve the performance of plan execution monitoring.
G. Coruhlu, E. Erdem and V. Patoglu
IEEE Transactions on Robotics (2021)
For gaining proficiency in physical human-robot interactions, it is crucial for engineering students to be provided with the opportunity to gain hands-on experience with robotic devices that feature kinesthetic feedback. In this article, we propose HandsOn-SEA, a low-cost, single degree-of-freedom, force-controlled educational robot with series elastic actuation and introduce educational modules for the use of the device to allow students to experience the fundamental performance trade-offs inherent in robotic systems. The novelty of the proposed robot is due to the deliberate introduction of a compliant element between the actuator and the handle, whose deflections are measured to perform closed-loop force control. As an admittance-type robot, HandsOn-SEA relies on force feedback to achieve the desired level of safety and transparency and complements the existing impedance-type educational robots. We present the integration of HandsOn-SEA into the robotics curriculum, by providing guidelines for its use in a senior level robotics course, to help students experience the challenges involved in the synergistic design and control of robotic devices. We systematically evaluate the efficacy of the device in a robotics course delivered for five semesters and provide evidence that HandsOn-SEA is effective in instilling fundamental concepts and trade-offs in the design and control of robotic devices.
A. Otaran, O. Tokatlu and V. Patoglu
IEEE Transactions on Haptics (2021)
Series elastic actuation (SEA) has become prevalent in applications involving physical human-robot interaction, as it provides considerable advantages over traditional stiff actuators in terms of stability robustness and force control fidelity. Several impedance control architectures have been proposed for SEA. Among these alternatives, the cascaded controller with an innermost velocity loop, an intermediate torque loop, and an outermost impedance loop is particularly favored for its simplicity, robustness, and performance. In this article, we derive the necessary and sufficient conditions for passively rendering null impedance and virtual springs with this cascade-controller architecture. Based on the newly established conditions, we provide nonconservative passivity design guidelines to haptically display these two impedance models, which serve as the basic building blocks of various virtual environments, while ensuring the safety of interaction. We also demonstrate the importance of including physical damping in the actuator model for deriving the passivity conditions, when integrators are utilized. In particular, we prove the unintuitive adversary effect of physical damping on the passivity of the system by noting that the damping term reduces the system Z-width, as well as introducing an extra passivity constraint. Finally, we experimentally validate our theoretical results using an SEA brake pedal.
F. E. Tosun, V. Patoglu
IEEE Transactions on Robotics (2020)
Physical human-robot interaction (pHRI) integrates the benefits of human operator and a collaborative robot in tasks involving physical interaction, with the aim of increasing the task performance. However, the design of interaction controllers that achieve safe and transparent operations is challenging, mainly due to the contradicting nature of these objectives. Knowing that attaining perfect transparency is practically unachievable, controllers that allow better compromise between these objectives are desirable. In this article, we propose a multicriteria optimization framework, which jointly optimizes the stability robustness and transparency of a closed-loop pHRI system for a given interaction controller. In particular, we propose a Pareto optimization framework that allows the designer to make informed decisions by thoroughly studying the tradeoff between stability robustness and transparency. The proposed framework involves a search over the discretized controller parameter space to compute the Pareto front curve and a selection of controller parameters that yield maximum attainable transparency and stability robustness by studying this tradeoff curve. The proposed framework not only leads to the design of an optimal controller, but also enables a fair comparison among different interaction controllers. In order to demonstrate the practical use of the proposed approach, integer and fractional order admittance controllers are studied as a case study and compared both analytically and experimentally. The experimental results validate the proposed design framework and show that the achievable transparency under fractional order admittance controller is higher than that of integer order one, when both controllers are designed to ensure the same level of stability robustness.
Y. Aydin, O. Tokatli, V. Patoglu, C. Basdogan
IEEE Transactions on Robotics (2020)
Variable stiffness tools have been shown to be advantageous for ensuring safety and improving stability, dynamic performance and energy efficiency of interaction tasks. In this article, we present the design, mathematical modeling, implementation, characterization and user evaluations of VnStylus, a stylus with hardware-based tip compliance modulation. The stiffness modulation of the stylus tip is achieved through transverse stiffness variations of axially loaded beams. This approach of mechanically-controlled stiffness variation is advantageous for a variable stiffness stylus, as it can be implemented using a fully compliant mechanism that alleviates the problem of friction forces dominating under miniaturization and allows for high fidelity stiffness display even for very low stiffness values. Thanks to its hardware-based impedance modulation, the device does not suffer from the bandwidth and the stable impedance rendering limitations of software-based impedance control strategies. Featuring a manual adjustment mechanism, the device does not necessitate actuators, sensor or electronics; hence, is lightweight, low cost, and robust. Experimental characterizations verify the large range of stiffness modulation that can be achieved and the accuracy of the equivalent stiffness model of the system. Human subject experiments provide evidence of the efficacy of the modulated stylus stiffness on human performance during several common interactions with styli.
O. C. Kara and V. Patoglu
IEEE Transactions on Haptics (2020)
In this article, we study the efficacy of haptic pedal feel compensation on driving safety and performance during regenerative braking. In particular, we evaluate the effectiveness of the preservation of the natural brake pedal feel under two-pedal cooperative braking and one-pedal driving scenarios, through human subject experiments in a simulated vehicle pursuit task. The experimental results indicate that pedal feel compensation can significantly decrease the hard braking instances, improving safety for both two-pedal cooperative braking and one-pedal driving conditions. Volunteers strongly prefer compensation, while they equally prefer and can effectively utilize two-pedal and one-pedal driving conditions. The beneficial effects of haptic pedal feel compensation on safety is evaluated to be larger for the two-pedal cooperative braking condition, as lack of compensation results in stiffening/softening pedal feel characteristics in this case.
U. Caliskan, V. Patoglu
IEEE Transactions on Haptics (2020)

Conditional planning is concerned with reaching goals from an initial state, in the presence of incomplete knowledge and partial observability, by considering all contingencies and by utilizing sensing actions to gather relevant knowledge when needed. We introduce a parallel offline algorithm, called HCPlan, for computing hybrid conditional plans.
A. Nouman, V. Patoglu, E. Erdem
International Journal of Robotics Research (2020)

In this paper, we provide a general framework to determine inner and outer approximations to the singularity-free workspace of fully actuated robotic manipulators, subject to Type-I and Type-II singularities. This framework utilizes the sum-of-squares optimization technique, which is numerically implemented by semidefinite programming. In order to apply the sum-of-squares optimization technique, we convert the trigonometric functions in the kinematics of the manipulator to polynomial functions with an additional constraint. We define two quadratic forms, describing two ellipsoids, whose volumes are optimized to yield inner and outer approximations of the singularity-free workspace.
W. Sirichotiyakul, V. Patoglu, A. C. Satici
ASME Journal of Mechanisms and Robotics (2020)

We propose a novel method for collaborative assembly planning under uncertainty, that utilizes hybrid conditional planning extended with commonsense reasoning and a rich set of communication actions for collaborative tasks.
M. Rizwan, V. Patoglu, E. Erdem
Theory and Practice of Logic Programming (2020)

We study a dynamic version of multi-agent path finding problem (called D-MAPF) where existing agents may leave and new agents may join the team at different times. We introduce a new method to solve D-MAPF based on conflict-resolution.
B. Atiq, V. Patoglu, E. Erdem
ICLP Technical Communications (2020)
We consider cognitive factories with multiple teams of heterogenous robots, and address two key challenges of these domains, hybrid reasoning for each team and finding an optimal global plan (with minimum makespan) for multiple teams. For hybrid reasoning, we propose modeling each team’s workspace taking into account capabilities of heterogeneous robots, embedding continuous external computations into discrete symbolic representation and reasoning, not only optimizing the makespans of local plans but also minimizing the total cost of robotic actions. To find an optimal global plan, we propose a semi-distributed approach that does not require exchange of information between teams but yet achieves on an optimal coordination of teams that can help each other.
Z. G. Saribatur, V. Patoglu, E. Erdem
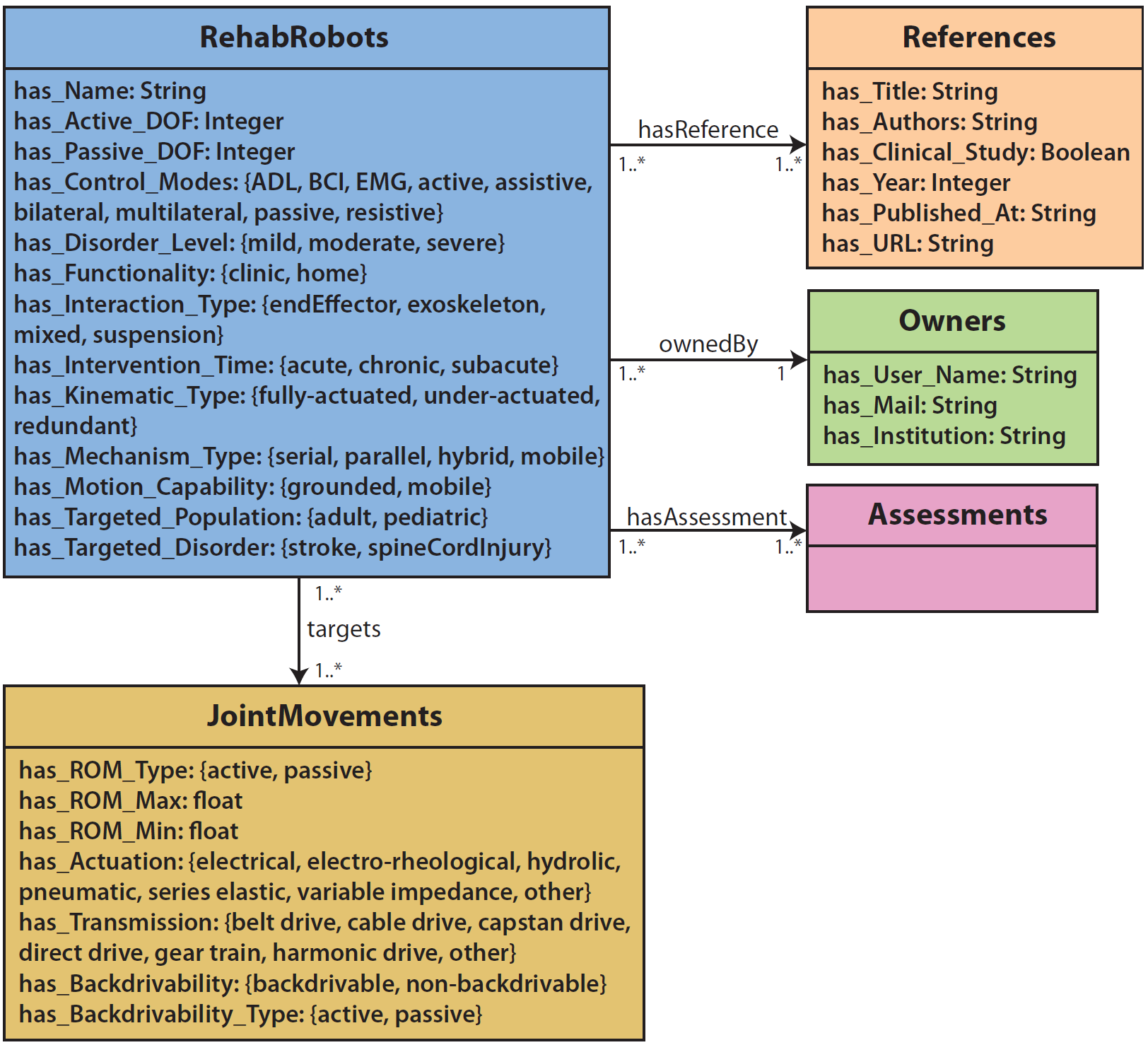
We introduce a novel method to answer natural language queries about rehabilitation robotics, over the formal ontology RehabRobo-Onto. We introduce a novel method to answer natural language queries about rehabilitation robotics, over the formal ontology RehabRobo-Onto. To facilitate the use of our method by experts, we develop an intelligent, interactive query answering system, called RehabRobo-Query, using Semantic Web technologies, and make it available on the cloud via Amazon web services.
Z. Dogmus, E. Erdem, V. Patoglu
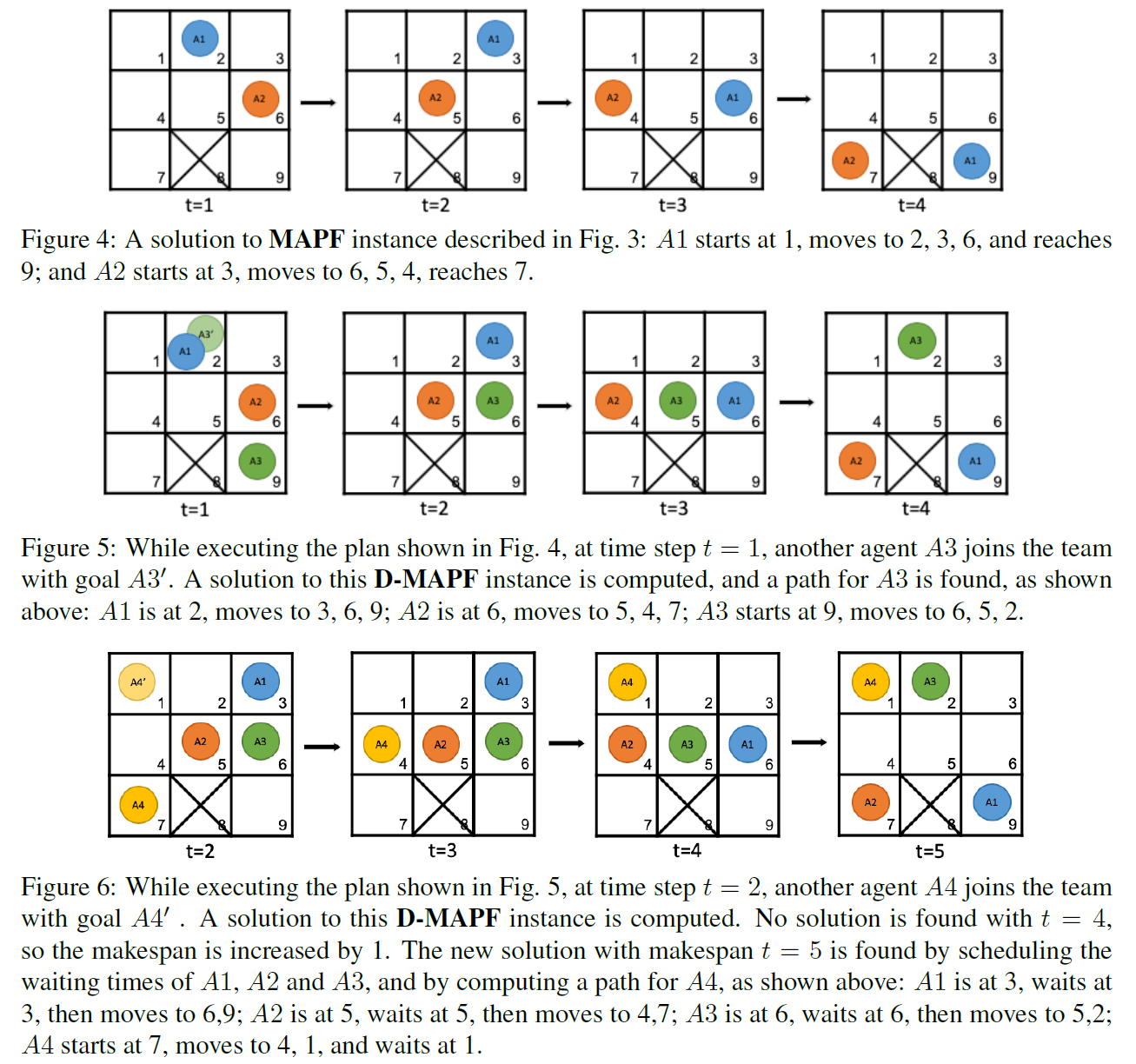
The multi-agent path finding (MAPF) problem is a combinatorial search problem that aims at finding paths for multiple agents such that no two agents collide with each other. We study a dynamic variant of MAPF, called D-MAPF, which allows changes in the environment (e.g., some existing obstacles may be removed from the environment or moved to some other location, or new obstacles may be included in the environment), and/or changes in the team (e.g., some existing agents may leave and some new agents may join the team) at different times. We introduce a new method to solve D-MAPF, using answer set programming.
A. Bogatarkan, V. Patoglu, E. Erdem
Global Conference on Artificial Intelligence (2019)
In the near future, humans and robots are expected to perform collaborative tasks involving physical interaction in various environments, such as homes, hospitals, and factories. Robots are good at precision, strength, and repetition, while humans are better at cognitive tasks. The concept, known as physical human-robot interaction (pHRI), takes advantage of these abilities and is highly beneficial by bringing speed, flexibility, and ergonomics to the execution of complex tasks. Current research in pHRI focuses on designing controllers and developing new methods which offer a better tradeoff between robust stability and high interaction performance. In this paper, we propose a new controller, fractional order admittance controller, for pHRI systems. The stability and transparency analyses of the new control system are performed computationally with human-in-the-loop. Impedance matching is proposed to map fractional order control parameters to integer order ones, and then the stability robustness of the system is studied analytically. Furthermore, the interaction performance is investigated experimentally through two human subject studies involving continuous contact with linear and nonlinear viscoelastic environments. The results indicate that the fractional order admittance controller can be made more robust and transparent than the integer order admittance controller and the use of fractional order term can reduce the human effort during tasks involving contact interactions with environment.
Y. Aydin, O. Tokatli, V. Patoglu, C. Basdogan
International Journal of Robotics Research (2018)
This work presents a systematic design selection methodology that utilizes a co-design strategy for system-level optimization of compliantly actuated robots that are known for their advantages over robotic systems driven by rigid actuators. The introduced methodology facilitates a decision-making strategy that is instrumental in making selections among system-optimal robot designs actuated by various degrees of variable or fixed compliance. While the simultaneous co-design method that is utilized throughout guarantees systems performing at their full potential, a homotopy technique is used to maintain integrity via generation of a continuum of robot designs actuated with varying degrees of variable and fixed compliance. Fairness of the selection methodology is ensured via utilization of common underlying (variable) compliant actuation principle and dynamical task requirements throughout the generated system designs. The direct consequence of the developed methodology is that it allows robot designers make informed selections among a variety of systems which are guaranteed to perform at their best. Applicability of the introduced methodology has been validated using a case study for system-optimal design of an active knee prosthesis that is driven by a mechanically adjustable compliance and controllable equilibrium position actuator (MACCEPA) under a periodic/real-life dynamical task.
A. Kamadan, G. Kiziltas, V. Patoglu
Robotic systems powered by variable stiffness actuators (VSAs) provide important benefits for applications that demand safety, performance, and energy-efficiency. Being multidisciplinary systems, performance of such devices cannot be fully exploited unless co-design techniques that account for their inherent design couplings are employed for their optimization. These co-design strategies enable a synergetic design of mechanical and control aspects of the system. We present application of two alternative co-design frameworks to robotic systems with VSA and demonstrate their effectiveness on a case study for optimal system design of a robotic prosthesis. Our results indicate that substantial reductions in required motor torques, leading to important performance gains in system weight and bandwidth can be achieved, compared with suboptimal designs where design couplings are not considered. Furthermore, we provide a critical evaluation of the trade-offs involved in utilizing simultaneous versus nested co-design frameworks to obtain system level optima. In particular, we contrast the ease of implementation and computational efficiency of the simultaneous framework with the modular structure of the nested framework that allows using discipline-specific optimization tools and provide guidance in selecting the appropriate method for a given design task. Finally, through an example, we provide evidence that the system level optimization results can guide design of novel and more efficient actuation concepts.
A. Kamadan, G. Kiziltas, V. Patoglu
IEEE Transactions on Mechatronics (2018)

We discuss applications of ASP in robotic planning, considering (1) full observability and complete knowledge and (2) with incomplete knowledge and partial observability. We emphasize the strengths of ASP as a useful knowledge representation and reasoning paradigm to integrate AI and robotics, as well as its flexibility to provide different levels of integration of feasibility checks with planning.
Esra Erdem, Volkan Patoglu
KI - Künstliche Intelligenz (2018)
The presence of strong magnetic fields in the magnetic resonance imaging (MRI) environment limits the integration of robotic rehabilitation systems in the MRI process. The tendency to improve imaging quality by the amplification of magnetic field strength further tightens the bidirectional compatibility constraints on MRI-compatible rehabilitation devices. We present the design, control and characterization of MRI-VisAct– a low-cost, Bowden-cable-actuated rotary series viscoelastic actuator that satisfies the bidirectional compatibility requirements to the maximum extent. Components of MRI-VisAct that are placed in the magnet room are built using nonconductive, diamagnetic MRI-compatible materials, while ferromagnetic or paramagnetic components are placed in the control room, located outside the MRI room. Power and data transmission are achieved through Bowden cables and fibre optics, respectively. This arrangement ensures that neuroimaging artefacts are minimized, while eliminating safety hazards, and device performance is not affected by the magnetic field. MRI-VisAct works under closed-loop torque control enabled through series viscoelastic actuation. MRI-VisAct is fully customizable; it can serve as a building block of higher-degrees-of-freedom MRI-compatible robotic devices.
Y. M. Senturk, V. Patoglu
Sage Transactions of the Institute of Measurement and Control (2017)
We introduce a parallel offline algorithm for computing hybrid conditional plans, called HCP-ASP, oriented towards robotics applications. HCP-ASP relies on modeling actuation actions and sensing actions in an expressive nonmonotonic language of answer set programming (ASP), and computation of the branches of a conditional plan in parallel using an ASP solver.
I. F. Yalciner, A. Nouman, V. Patoglu, E. Erdem
Theory and Practice of Logic Programming (2017)

Objective– Recent brain-computer interface (BCI) assisted stroke rehabilitation protocols tend to focus on sensorimotor activity of the brain. Relying on evidence claiming that a variety of brain rhythms beyond sensorimotor areas are related to the extent of motor deficits, we propose to identify neural correlates of motor learning beyond sensorimotor areas spatially and spectrally for further use in novel BCI-assisted neurorehabilitation settings. Approach– Electroencephalographic (EEG) data were recorded from healthy subjects participating in a physical force-field adaptation task involving reaching movements through a robotic handle. EEG activity recorded during rest prior to the experiment and during pre-trial movement preparation was used as features to predict motor adaptation learning performance across subjects.
O. Ozdenizci, M. Yalcin, A. Erdogan, V. Patoglu, M. Grosse-Wentrup, M. Cetin
Journal of Neural Engineering (2017)
We present the kinematics, optimal dimensional synthesis, series-elastic actuation, control, characterization and user evaluation of ASSISTON-ANKLE, a reconfigurable, powered exoskeleton for ankle rehabilitation. ASSISTON-ANKLE features reconfigurable kinematics for delivery of both range of motion (RoM)/strengthening and balance/proprioception exercises. In particular, through lockable joints, the underlying kinematics can be configured to either a self-aligning parallel mechanism that can naturally cover the whole RoM of the human ankle, or another parallel mechanism that can support the ground reaction forces/torques transferred to the ankle. Utilizing a single device to treat multiple phases of treatment is advantageous for robotic rehabilitation, since not only does it decrease the device cost and help with the space requirements, but also shorten the time it takes for patients to familiarize with the device. Bowden cable-based series-elastic actuation of ASSISTON-ANKLE allows for a remote placement of the motors/drivers to result in a compact design with low apparent inertia, while also enabling high-fidelity force/impedance control and active backdriveability of the device.
A. Erdogan, B. Celebi, A. C. Satici, V. Patoglu
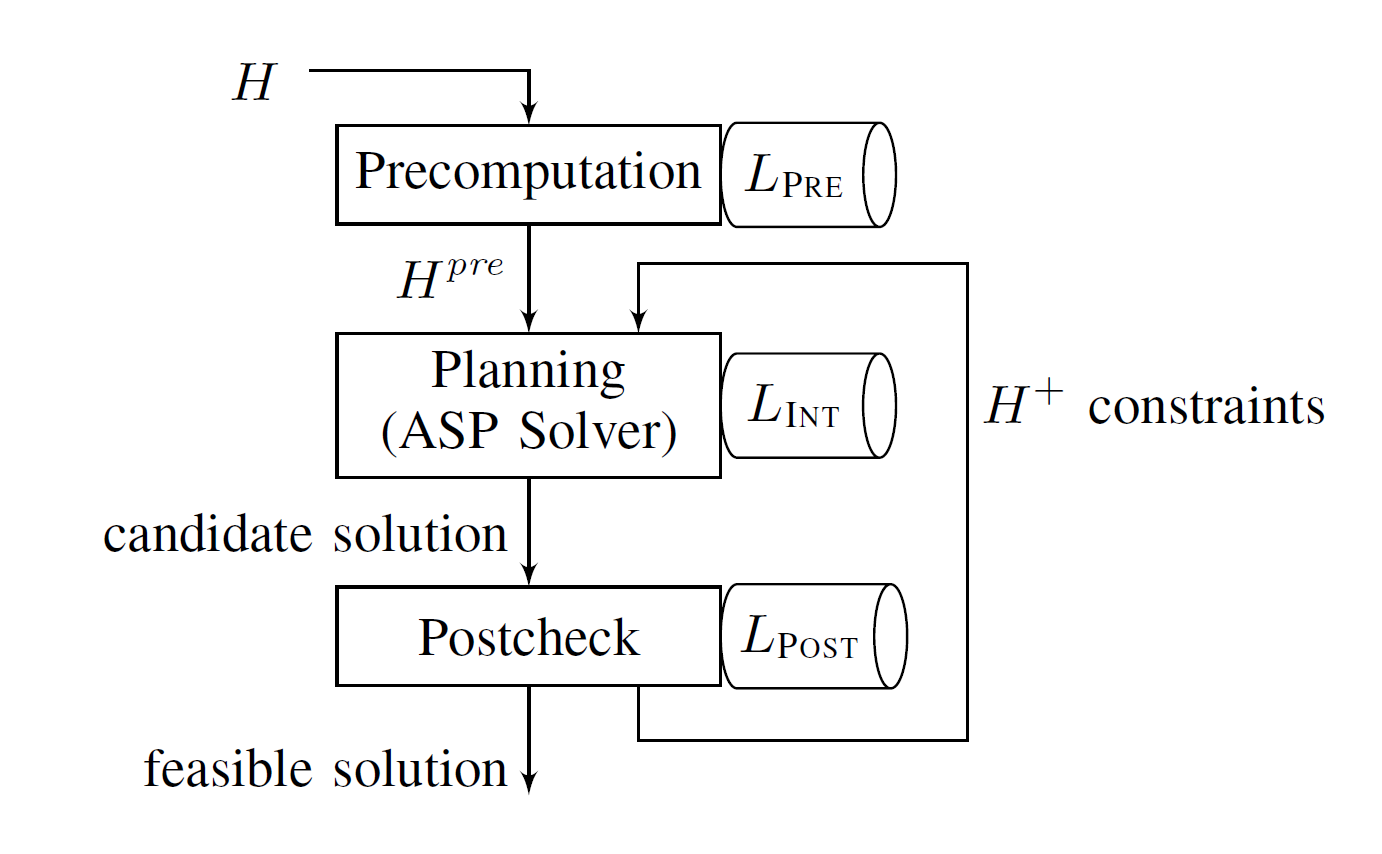
We provide a systematic analysis of levels of integration between discrete high-level reasoning and continuous low-level feasibility checks to address hybrid planning problems in robotic applications. We identify four distinct strategies for such an integration; a) low-level checks are done for all possible cases in advance and the results are used during plan generation, b) low-level checks are done exactly when they are needed during the search for a plan, c) low-level checks are done after a plan is computed, and if the plan is found infeasible then a new plan is computed, d) similar to the previous strategy but the results of previous low-level checks are used during computation of a new plan. We analyze the usefulness of these strategies and their combinations by experiments on hybrid planning problems in different robotic application domains, in terms of computational efficiency and plan quality (relative to its feasibility).
Esra Erdem, Volkan Patoglu, Peter Schuller

This paper presents ReAct!, an interactive educational tool for artificial intelligence (AI) planning for robotics. ReAct! enables students to describe robots’ actions and change in dynamic domains without first having to know about the syntactic and semantic details of the underlying formalism, and to solve planning problems using state-of-the-art reasoners without having to know about their input/output language or usage. In particular, ReAct! can be used to represent sophisticated dynamic domains that feature concurrency, indirect effects of actions, and state/transition constraints. ReAct! also allows the embedding of externally defined calculations (e.g., checking for collision-free continuous trajectories) into domain representations of hybrid domains that require a tight integration of (discrete) high-level reasoning with (continuous) geometric reasoning. ReAct! also allows students to solve planning problems that involve complex temporal goals.
Z. Dogmus, E. Erdem, V. Patoglu
IEEE Transactions on Education (2015)
Representing the available information about rehabilitation robots in a structured form, as an ontology, facilitates access to various kinds of information about the existing robots, and thus it is important both from the point of view of rehabilitation robotics and from the point of view of physical medicine. Rehabilitation robotics researchers can learn various properties of the existing robots and access to the related publications to further improve the state-of-the-art. Physical medicine experts can find information about rehabilitation robots and related publications (possibly including results of clinical studies) to better identify the right robot for a particular therapy or patient population. Therefore, considering also the advantages of ontologies and ontological reasoning, such as interoperability of various heterogeneous knowledge resources (e.g., patient databases or disease ontologies), such an ontology provides the underlying mechanisms for translational physical medicine, from bench-to-bed and back, and personalized rehabilitation robotics. With these motivations, the first formal rehabilitation robotics ontology, called RehabRobo-Onto, is designed and developed, collaborating with experts in robotics and in physical medicine. A web based software (called RehabRobo-Query) with an easy-to-use intelligent user-interface is also built. RehabRobo-Query allows robot designers to add/modify information about their rehabilitation robots to/from RehabRobo-Onto. The ontology system consisting of RehabRobo-Onto and RehabRobo-Query is made available on the cloud, utilizing Amazon Web services, to provide a reliable environment for access, development and maintenance of RehabRobo-Onto by rehabilitation robot designers and physical medicine experts around the world. HighlightsRehabRobo-Onto is the first formal rehabilitation robotics ontology.It is open access on the cloud via Amazon EC2 Web services.It is interoperable with other knowledge resources (e.g, disease ontologies).It supports query answering using DL reasoners and Semantic Web technologies.Rehabilitation robotics researchers and physical medicine experts are potential users.
Z. Dogmus, E. Erdem, V. Patoglu
Robotics and Computer Integrated Manufacturing (2015)
We present the design, control, and human–machine interface of a series elastic holonomic mobile platform, AssistOn-Mobile, aimed to administer therapeutic table-top exercises to patients who have suffered injuries that affect the function of their upper extremities. The proposed mobile platform is a low-cost, portable, easy-to-use rehabilitation device targeted for home use. In particular, AssistOn-Mobile consists of a holonomic mobile platform with four actuated Mecanum wheels and a compliant, low-cost, multi-degrees-of-freedom series elastic element acting as its force sensing unit. Thanks to its series elastic actuation, AssistOn-Mobile is highly backdriveable and can provide assistance/resistance to patients, while performing omni-directional movements on plane. AssistOn-Mobile also features Passive Velocity Field Control (PVFC) to deliver human-in-the-loop contour tracking rehabilitation exercises. PVFC allows patients to complete the contour-tracking tasks at their preferred pace, while providing the proper amount of assistance as determined by the therapists. PVFC not only minimizes the contour error but also does so by rendering the closed-loop system passive with respect to externally applied forces; hence, ensures the coupled stability of the human-robot system. We evaluate the feasibility and effectiveness of AssistOn-Mobile with PVFC for rehabilitation and present experimental data collected during human subject experiments under three case studies. In particular, we utilize AssistOn-Mobile with PVFC (a) to administer contour following tasks where the pace of the tasks is left to the control of the patients, so that the patients can assume a natural and comfortable speed for the tasks, (b) to limit compensatory movements of the patients by integrating a RGB-D sensor to the system to continually monitor the movements of the patients and to modulate the task speeds to provide online feedback to the patients, and (c) to integrate a Brain–Computer Interface such that the brain activity of the patients is mapped to the robot speed along the contour following tasks, rendering an assist-as-needed protocol for the patients with severe disabilities. The feasibility studies indicate that AssistOn-Mobile holds promise in improving the accuracy and effectiveness of repetitive movement therapies, while also providing quantitative measures of patient progress.
M. Sarac, M. A. Ergin, A. Erdogan, V. Patoglu
We present AssistOn-Finger, a novel under-actuated active exoskeleton for robot-assisted tendon therapy of human fingers. The primary use for the exoskeleton is to assist flexion/extension motions of a finger within its full range, while decreasing voluntary muscle contractions helping to keep the tendon tension levels to stay within acceptable limits, avoiding gap formation or rupture of the suture. The device can also be employed to administer range of motion (RoM)/strengthening exercises. AssistOn-Finger is designed to be passively back-driveable, can cover the whole RoM of patients, and can do so in a natural and coordinated manner. In particular, the device employs human finger as an integral part of its kinematics and when coupled to a human operator, the parallel kinematic structure of exoskeleton supports three independent degrees of freedom, dictated by the kinematics of the human finger. Automatically aligning its joint axes to match finger joint axes, AssistOn-Finger can guarantee ergonomy and comfort throughout the therapy. The self-aligning feature also significantly shortens the setup time required to attach the patient to the exoskeleton. We present the kinematic type selection for the exoskeleton to satisfy the design requirements for tendon therapy applications, detail optimal dimensional synthesis of the device considering trade-offs between multiple design criteria and discuss implementation details of the exoskeleton. We also present feasibility studies conducted on healthy volunteers and provide statistical evidence on the efficacy of exoskeleton driven exercises in keeping the average muscle recruitment and the maximum tendon tension levels as low as human guided therapies.
I. H. Ertas, E. Hocaoglu, V. Patoglu
We study the problem of finding optimal plans for multiple teams of robots through a mediator, where each team is given a task to complete in its workspace on its own and where teams are allowed to transfer robots between each other, subject to the following constraints 1) teams (and the mediator) do not know about each other’s workspace or tasks (e.g., for privacy purposes); 2) every team can lend or borrow robots, but not both (e.g., transportation/calibration of robots between/for different workspaces is usually costly). We present a mathematical definition of this problem and analyze its computational complexity. We introduce a novel, logic-based method to solve this problem, utilizing action languages and answer set programming for representation, and the state-of-the-art ASP solvers for reasoning. We show the applicability and usefulness of our approach by experiments on various scenarios of responsive and energy-efficient cognitive factories.
E. Erdem, V. Patoglu, Z. Saribatur, P. Schueller, T. Uras
Theory and Practice of Logic Programming (2013)
Answer set programming (ASP) is a knowledge representation and reasoning paradigm with high-level expressive logic-based formalism, and efficient solvers; it is applied to solve hard problems in various domains, such as systems biology, wire routing, and space shuttle control. In this paper, we present an application of ASP to housekeeping robotics. We show how the following problems are addressed using computational methods/tools of ASP (1) embedding commonsense knowledge automatically extracted from the commonsense knowledge base ConceptNet, into high-level representation, and (2) embedding (continuous) geometric reasoning and temporal reasoning about durations of actions, into (discrete) high-level reasoning. We introduce a planning and monitoring algorithm for safe execution of plans, so that robots can recover from plan failures due to collision with movable objects whose presence and location are not known in advance or due to heavy objects that cannot be lifted alone. Some of the recoveries require collaboration of robots. We illustrate the applicability of ASP on several housekeeping robotics problems, and report on the computational efficiency in terms of CPU time and memory.
E. Erdem, E. Aker, V. Patoglu
Springer Intelligent Service Robotics (2012)

Virtual reality with haptic feedback provides a safe and versatile practice medium for many manual control tasks. Haptic guidance has been shown to improve performance of manual control tasks in virtual environments; however, the efficacy of haptic guidance for training in virtual environments has not been studied conclusively. This article presents experimental results that show negative efficacy of haptic guidance during training in virtual environments. The haptic guidance in this study is a fixed-gain error-reducing shared controller, with the control effort overlaid on the dynamics of the manual control task during training. Performance of the target-hitting manual control task in the absence of guidance is compared for three training protocols. One protocol contained no haptic guidance and represented virtual practice. Two protocols utilized haptic guidance, varying the duration of exposure to guidance during the training sessions. Exposure to the fixed-gain error-reducing shared controller had a detrimental effect on performance of the target-hitting task at the conclusion of a month-long training protocol, regardless of duration of exposure. While the shared controller was designed with knowledge of the task and an intuitive sense of the motions required to achieve good performance, the results indicate that the acquisition of motor skill is a complex phenomenon that is not aided with haptic guidance during training as implemented in this experiment.
Y. Li, V. Patoglu, M. K. O’Malley
ACM Transactions on Applied Perception (2009)
It has been shown that humans use combined feedforward and feedback control strategies when manipulating external dynamic systems, and when exciting virtual dynamic systems at resonance, that they can tune their control parameters in response to changing natural frequencies. We present a study to determine the discrimination thresholds for the natural frequency of such resonant dynamic systems. Weber fractions (WFs in %) are reported for the discrimination of 1, 2, 4, and 8 Hz natural frequencies. Participants were instructed either to passively perceive or actively excite the virtual system via a one degree-of-freedom haptic interface with visual and/or haptic feedback. The average WF for natural frequency ranged from 4% to 8.5% for 1,2, and 4 Hz reference natural frequencies, while the WF was approximately 20% for systems with a reference natural frequency of 8 Hz. Results indicate that sensory feedback modality has a significant effect on WF during passive perception, but no significant effect in the active perception case. The data also suggest that discrimination sensitivity is not significantly affected by excitation mode. Finally, results for systems with equivalent natural frequencies but different spring stiffness indicate that participants do not discriminate natural frequency based on the maximum force magnitude perceived.
A. Israr, Y. Li, V. Patoglu, M. K. O’Malley
IEEE Transactions on Haptics (2009)
This paper presents the design, control and performance of a high fidelity four degree-of-freedom wrist exoskeleton robot, RiceWrist, for training and rehabilitation. The RiceWrist is intended to provide kinesthetic feedback during the training of motor skills or rehabilitation of reaching movements. Motivation for such applications is based on findings that show robot-assisted physical therapy aids in the rehabilitation process following neurological injuries. The exoskeleton device accommodates forearm supination and pronation, wrist flexion and extension and radial and ulnar deviation in a compact parallel mechanism design with low friction, zero backlash and high stiffness. As compared to other exoskeleton devices, the RiceWrist allows easy measurement of human joint angles and independent kinesthetic feedback to individual human joints. In this paper, joint-space as well as task-space position controllers and an impedance-based force controller for the device are presented. The kinematic performance of the device is characterized in terms of its workspace, singularities, manipulability, backlash and backdrivability. The dynamic performance of RiceWrist is characterized in terms of motor torque output, joint friction, step responses, behavior under closed loop set-point and trajectory tracking control and display of virtual walls. The device is singularity-free, encompasses most of the natural workspace of the human joints and exhibits low friction, zero-backlash and high manipulability, which are kinematic properties that characterize a high-quality impedance display device. In addition, the device displays fast, accurate response under position control that matches human actuation bandwidth and the capability to display sufficiently hard contact with little coupling between controlled degrees-of-freedom.
A. Gupta, V. Patoglu, C. Burgar, M. K. O’Malley
International Journal of Robotics Research (2008)
In this paper we present a simulator designed to handle multibody systems with changing constraints, wherein the equations of motion for each of its constraint configurations are formulated in minimal ODE form with constraints embedded before they are passed to an ODE solver. The constraint-embedded equations are formulated symbolically according to a re-combination of terms of the unconstrained equations, and this symbolic process is undertaken on-line by the simulator. Constraint-embedding undertaken on-the-fly enables the simulation of systems with an ODE solver for which constraints are not known prior to simulation start or for which the enumeration of all constraint conditions would be unwieldy because of their complexity or number. Issues of drift associated with DAE solvers that usually require stabilization are sidestepped with the constraint-embedding approach. We apply nomenclature developed for hybrid dynamical systems to describe the system with changing constraints and to distinguish the roles of the forward dynamics solver, a collision detector, and an impact resolver. We have prototyped the simulator in MATLAB and demonstrate the design using three representative examples.
A. Gupta, V. Patoglu, C. Burgar, M. K. O’Malley
Springer Journal of Multibody Systems Dynamics (2005)
A new minimum-distance tracking algorithm is presented for moving convex bodies represented using tiled-together parametric surface patches. The algorithm is formulated by differentiating the geometric minimization problem with respect to time. This produces a hybrid dynamical system that incorporates dependence on rigid body motion, surface shape, and surface boundary interconnectedness. The minimum distance between a pair of previously identified closest features is found by feedback stabilizing the dynamical equations and numerically solving the resulting closed-loop system equations. Maintenance of the minimum distance and the associated closest points during motion is achieved through the action of a feedforward controller and a switching algorithm. The feedforward controller simultaneously accounts for surface shape and motion while the switching controller triggers updates to the extremal feature pair when extremal points on one body cross between Voronoi regions of the other body. In contrast to previously available minimum distance determination algorithms, attractive properties of the new algorithm include a means of determining the highest gain K that maintains stability under a given discretization scheme and a large and easily characterized basin of attraction of the stabilized closest points. These properties may be used to achieve higher computational efficiency. Simulation results are presented for various planar and spatial systems composed of a body and point or composed of two bodies.
V. Patoglu, B. Gillespie
IEEE Transactions on Robotics (2005)

Please visit Google Scholar for a complete list of publications
V. Patoglu
Publications List in Google Scholar
List of Publications
Musculoskeletal Simulation-Based Multi-criteria Optimization Framework for Exoskeleton Design
A.K. Bonab and V. Patoglu
IEEE Transactions on Neural Systems and Rehabilitation Engineering (2026)
Human-in-the-Loop Pareto Optimization: Trade-off Characterization for Assist-as-Needed Training and Performance Evaluation
H. Tolasa and V. Patoglu
IEEE Transactions on Haptics (2026)
Advancing Precision Rehabilitation Through a Sensor-Based 6-DoF Robotic Exoskeleton: Clinical Validation and Ergonomic Assessment
H. Argunsah, B. Yalcin, M. A. Ergin, G. Coruhlu, M. Yalcin, V. Patoglu and Z. Guven
Sensors (2026)
Effect of Inherent Damping of the Series Elastic Element on Rendering Performance and Passivity of Interaction Control
C. U. Kenanoglu and V. Patoglu
ASME Journal of Dynamic Systems, Measurement, and Control (2025)
Effect of Reduced-Order Modelling on Passivity and Rendering Performance Analysis of Series Elastic Actuation
C. U. Kenanoglu and V. Patoglu
IEEE Robotics and Automation Letters (2025)
Human-in-the-Loop Optimization of Perceived Realism of Multi-Modal Haptic Rendering Under Conflicting Sensory Cues
H. Tolasa, B. Catkin and V. Patoglu
IEEE Transactions on Haptics (2025)
Passive Realizations of Series Elastic Actuation: Effects of Plant and Controller Dynamics on Haptic Rendering Performance
C. U. Kenanoglu and V. Patoglu
IEEE Transactions on Haptics (2024)
Preference-Based Human-in-the-Loop Optimization for Perceived Realism of Haptic Rendering
B. Catkin and V. Patoglu
IEEE Transactions on Haptics (2023)
Effect of Low-Pass Filtering on Passivity and Rendering Performance of Series Elastic Actuation
T. Kenanoglu, C. U. Kenanoglu and V. Patoglu
IEEE Transactions on Haptics (2023)
A Fundamental Limitation of Passive Spring Rendering With Series Elastic Actuation
C. U. Kenanoglu and V. Patoglu
IEEE Transactions on Haptics (2023)
sEMG-Based Natural Control Interface for a Variable Stiffness Transradial Hand Prosthesis
E. Hocaoglu and V. Patoglu
Frontiers in NeuroRobotics(2022)
Design, Implementation, and Evaluation of a Variable Stiffness Transradial Hand Prosthesis
E. Hocaoglu and V. Patoglu
Frontiers in NeuroRobotics(2022)
Passivity of Series Elastic Actuation Under Model Reference Force Control During Null Impedance Rendering
C. U. Kenanoglu and V. Patoglu
IEEE Transactions on Haptics (2022)
Multi-agent Pick and Delivery with Capacities: Action Planning Vs Path Finding
N. Tajelipirbazari, C. U. Yildirimoglu, O. Sabuncu, A. C. Arici, I. H. Ozen, V. Patoglu and E. Erdem
International Symposium on Practical Aspects of Declarative Languages (2022)
Passivity of Series Damped Elastic Actuation under Velocity-Sourced Impedance Control
U. Mengilli, Z. O. Orhan, U. Caliskan and V. Patoglu
IEEE World Haptics (2021)
Explainable Robotic Plan Execution Monitoring Under Partial Observability
G. Coruhlu, E. Erdem and V. Patoglu
IEEE Transactions on Robotics (2021)
Physical Human-Robot Interaction Using HandsOn-SEA: An Educational Robotic Platform With Series Elastic Actuation
A. Otaran, O. Tokatlu and V. Patoglu
IEEE Transactions on Haptics (2021)
Necessary and Sufficient Conditions for the Passivity of Impedance Rendering with Velocity-Sourced Series Elastic Actuation
F. E. Tosun, V. Patoglu
IEEE Transactions on Robotics (2020)
A Computational Multicriteria Optimization Approach to Controller Design for Physical Human-Robot Interaction
Y. Aydin, O. Tokatli, V. Patoglu, C. Basdogan
IEEE Transactions on Robotics (2020)
VnStylus: A Haptic Stylus with Variable Tip Compliance
O. C. Kara and V. Patoglu
IEEE Transactions on Haptics (2020)
Efficacy of Haptic Pedal Feel Compensation on Driving With Regenerative Braking
U. Caliskan, V. Patoglu
IEEE Transactions on Haptics (2020)
Hybrid Conditional Planning for Robotic Applications
A. Nouman, V. Patoglu, E. Erdem
International Journal of Robotics Research (2020)
Efficient Singularity-FreeWorkspace Approximations Using Sum-of-Squares Programming
W. Sirichotiyakul, V. Patoglu, A. C. Satici
ASME Journal of Mechanisms and Robotics (2020)
Human Robot Collaborative Assembly Planning: An Answer Set Programming Approach
M. Rizwan, V. Patoglu, E. Erdem
Theory and Practice of Logic Programming (2020)
Dynamic Multi-Agent Path Finding based on Conflict Resolution using Answer Set Programming
B. Atiq, V. Patoglu, E. Erdem
ICLP Technical Communications (2020)
Finding optimal feasible global plans for multiple teams of heterogeneous robots using hybrid reasoning: an application to cognitive factories
Z. G. Saribatur, V. Patoglu, E. Erdem
Autonomous Robots (2019)
RehabRobo-Query: Answering natural language queries about rehabilitation robotics ontology on the cloud
Z. Dogmus, E. Erdem, V. Patoglu
Semantic Web (2019)
A Declarative Method for Dynamic Multi-Agent Path Finding
A. Bogatarkan, V. Patoglu, E. Erdem
Global Conference on Artificial Intelligence (2019)
Stable Physical Human-Robot Interaction Using Fractional Order Admittance Control
Y. Aydin, O. Tokatli, V. Patoglu, C. Basdogan
International Journal of Robotics Research (2018)
A Systematic Design Selection Methodology for System-Optimal Compliant Actuation
A. Kamadan, G. Kiziltas, V. Patoglu
Robotica (2018)
Co-Design Strategies for Optimal Variable Stiffness Actuation
A. Kamadan, G. Kiziltas, V. Patoglu
IEEE Transactions on Mechatronics (2018)
Applications of ASP in Robotics
Esra Erdem, Volkan Patoglu
KI - Künstliche Intelligenz (2018)
MRI-VisAct: A Bowden Cable-driven MRI Compatible Series Viscoelastic Actuator
Y. M. Senturk, V. Patoglu
Sage Transactions of the Institute of Measurement and Control (2017)
Hybrid conditional planning using answer set programming
I. F. Yalciner, A. Nouman, V. Patoglu, E. Erdem
Theory and Practice of Logic Programming (2017)
Electroencephalographic Identifiers of Motor Adaptation Learning
O. Ozdenizci, M. Yalcin, A. Erdogan, V. Patoglu, M. Grosse-Wentrup, M. Cetin
Journal of Neural Engineering (2017)
AssistOn-Ankle: A Reconfigurable Ankle Exoskeleton with Series-Elastic Actuation
A. Erdogan, B. Celebi, A. C. Satici, V. Patoglu
Autonomous Robots (2016)
A systematic analysis of levels of integration between high-level task planning and low-level feasibility checks
Esra Erdem, Volkan Patoglu, Peter Schuller
AI Communications (2016)
ReAct!: An Interactive Educational Tool for AI Planning for Robotics
Z. Dogmus, E. Erdem, V. Patoglu
IEEE Transactions on Education (2015)
RehabRobo-Onto: Design, Development and Maintenance of a Rehabilitation Robotics Ontology on the Cloud.
Z. Dogmus, E. Erdem, V. Patoglu
Robotics and Computer Integrated Manufacturing (2015)
AssistOn-Mobile: A Series Elastic Holonomic Mobile Platform for Upper Extremity Rehabilitation
M. Sarac, M. A. Ergin, A. Erdogan, V. Patoglu
Robotica (2014)
AssistOn-Finger: An Under-Actuated Finger Exoskeleton for Robot-Assisted Tendon Therapy
I. H. Ertas, E. Hocaoglu, V. Patoglu
Robotica (2014)
Finding Optimal Plans for Multiple Teams of Robots through a Mediator: A Logic-Based Approach
E. Erdem, V. Patoglu, Z. Saribatur, P. Schueller, T. Uras
Theory and Practice of Logic Programming (2013)
Answer Set Programming for Collaborative Housekeeping Robotics: Representation, Reasoning, and Execution
E. Erdem, E. Aker, V. Patoglu
Springer Intelligent Service Robotics (2012)
A Multi-Lateral Rehabilitation System
A. C. Satici, A. Erdogan, V. Patoglu
Turkish Journal of Electrical Engineering and Computer Science (2011)
Non-overshooting Force Control of Series Elastic Actuators
O. Tokatli, V. Patoglu
Solid State Phenomena (2010)
Negative Efficacy of Fixed Gain Error Reducing Shared Control for Training in Virtual Environments
Y. Li, V. Patoglu, M. K. O’Malley
ACM Transactions on Applied Perception (2009)
Passive and Active Discrimination of Natural Frequency of Virtual Dynamic Systems
A. Israr, Y. Li, V. Patoglu, M. K. O’Malley
IEEE Transactions on Haptics (2009)
Design, Control and Performance of RiceWrist: A Force Feedback Wrist Exoskeleton for Rehabilitation and Training
A. Gupta, V. Patoglu, C. Burgar, M. K. O’Malley
International Journal of Robotics Research (2008)
Online Symbolic Constraint Embedding for Simulation of Hybrid Dynamical Systems
A. Gupta, V. Patoglu, C. Burgar, M. K. O’Malley
Springer Journal of Multibody Systems Dynamics (2005)
A Feedback Stabilized Minimum Distance Maintenance for Convex Parametric Surfaces
V. Patoglu, B. Gillespie
IEEE Transactions on Robotics (2005)
Complete List of Publications of Prof. Patoglu
V. Patoglu
Publications List in Google Scholar